Der über das GNSS-Modul ermittelte Standort wird von dem Basismodul ELV-LW-Base per LoRaWAN® übermittelt. Die Positionsermittlung ist an einen Bewegungsalgorithmus gekoppelt, sodass nur nach Positionsdaten gesucht wird, wenn sich das Modul bewegt hat. Neben der reinen Positionsermittlung von Gegenständen unterstützt das ELV-Track die Nutzung des Open-Source-Projekts TTN Mapper. Hier lässt sich das Modul in Verbindung mit der ELV-LW-Base und einer Spannungsversorgung nutzen, um die LoRaWAN®-Abdeckung auf einer Karte zu visualisieren (Kartierung).
Produkt Highlights
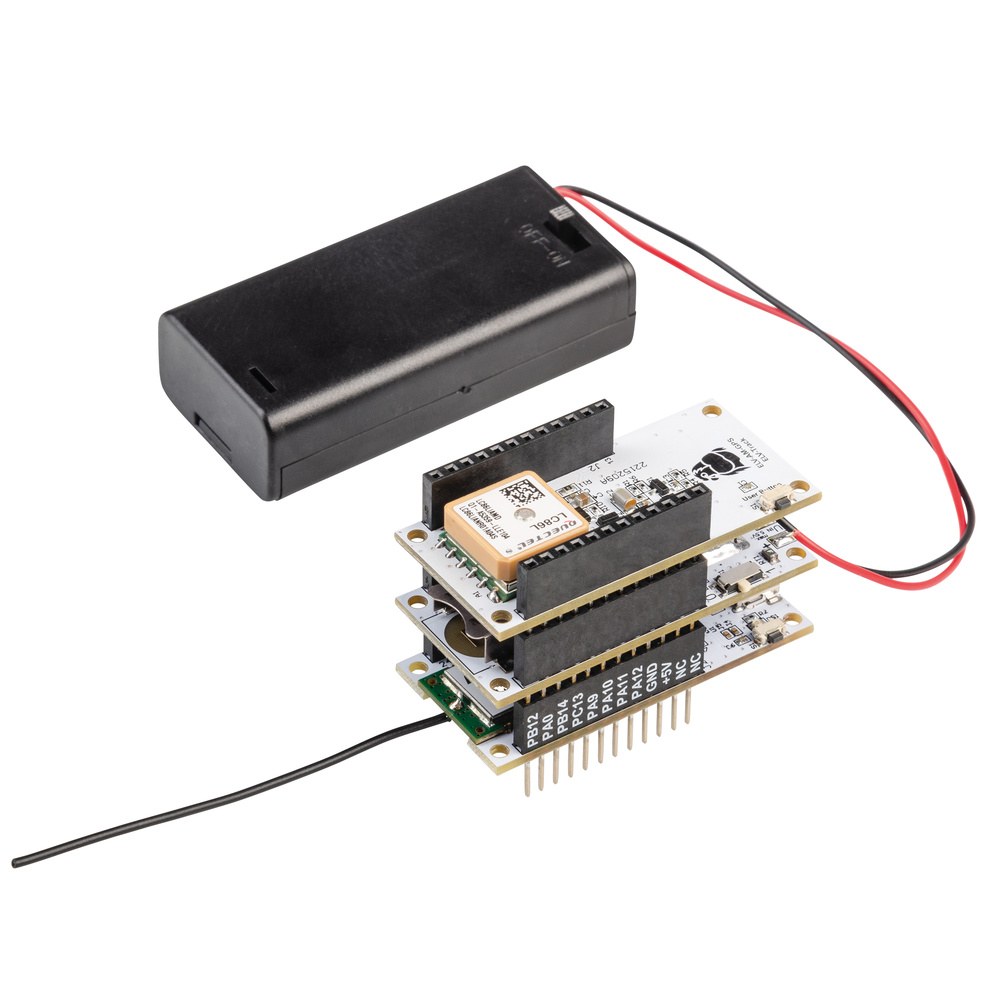
- Das Modul passt auf das Basismodul ELV-LW-Base aus dem stapelbaren ELV-Modulsystem und kann z. B. über das ELV-Buttoncell oder das ELV-EnergyHarv mit Spannung versorgt werden.
- Die Anwendungen sind vielfältig – von der Logistikverfolgung über Kartierung und Kontrolle von Robotern bis zur Verfolgung von Fahrzeugen, z. B. in Verleihdiensten.
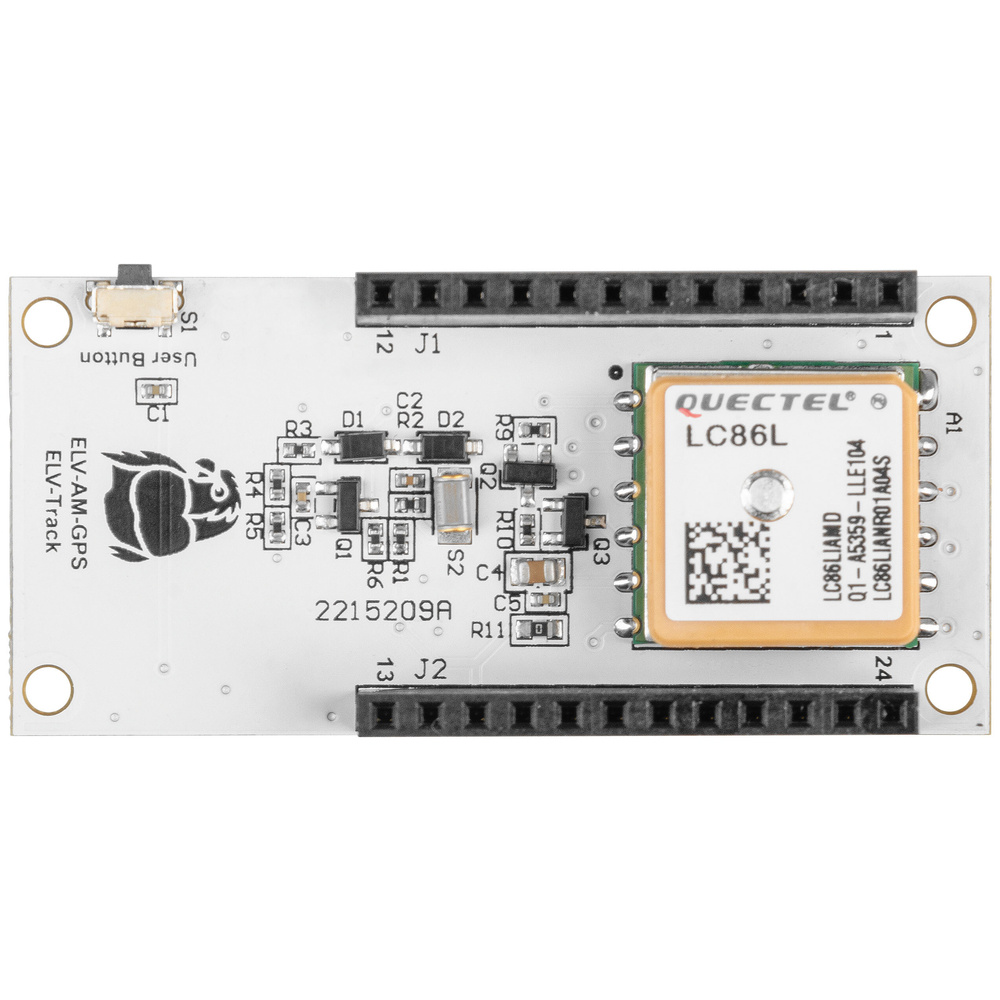
- ELV-Track-Modul mit GNSS-Modul (Quectel LC86L) zur Positionsbestimmung per Satellit
- Integrierter Bewegungsalgorithmus: Bei Bewegung erfolgt Aufwachen aus dem Stromsparmodus und Erfassen der Positionsdaten, danach Datenversand per LoRaWAN®
- Übermittlung der Position (Längen-/Breitengrad, Höhenlage), Qualitätsindex (HDOP), Batteriespannung und Grund der Übertragung
- Zyklische Positionsmeldung bei laufender Bewegung, Zyklus zwischen 30 s und 7650 s konfigurierbar
- Bewegungsalgorithmus über User-Button manuell aktiver- und deaktivierbar
Hinweis: Aufgrund des großen Funktionsumfangs und der Komplexität kann ELV zu diesem Produkt im Hinblick auf die Software-Einbindung/Netzwerk-Infrastruktur (bspw. The Things Network) leider keinerlei Support übernehmen. Informationen zur Integration in ein LoRaWAN Netzwerk finden sie z.B. auf der Webseiten von The Things Stack oder ChirpStack Für die Visualisierung & Steuerung eignen sich IoT Plattformen wie TagoIO oder Datacake.

















")
